Baseline Robotics
Our mission is to democratise robotics research by making hardware more accessible. We provide API access to physical robots, enabling reproducible and demo-ready experiments to help bridge the sim-to-real gap without having to deal with hardware.
Bimanual manipulation and dexterity stations
Book bimanual manipulation today. Dexterity stations coming soon.
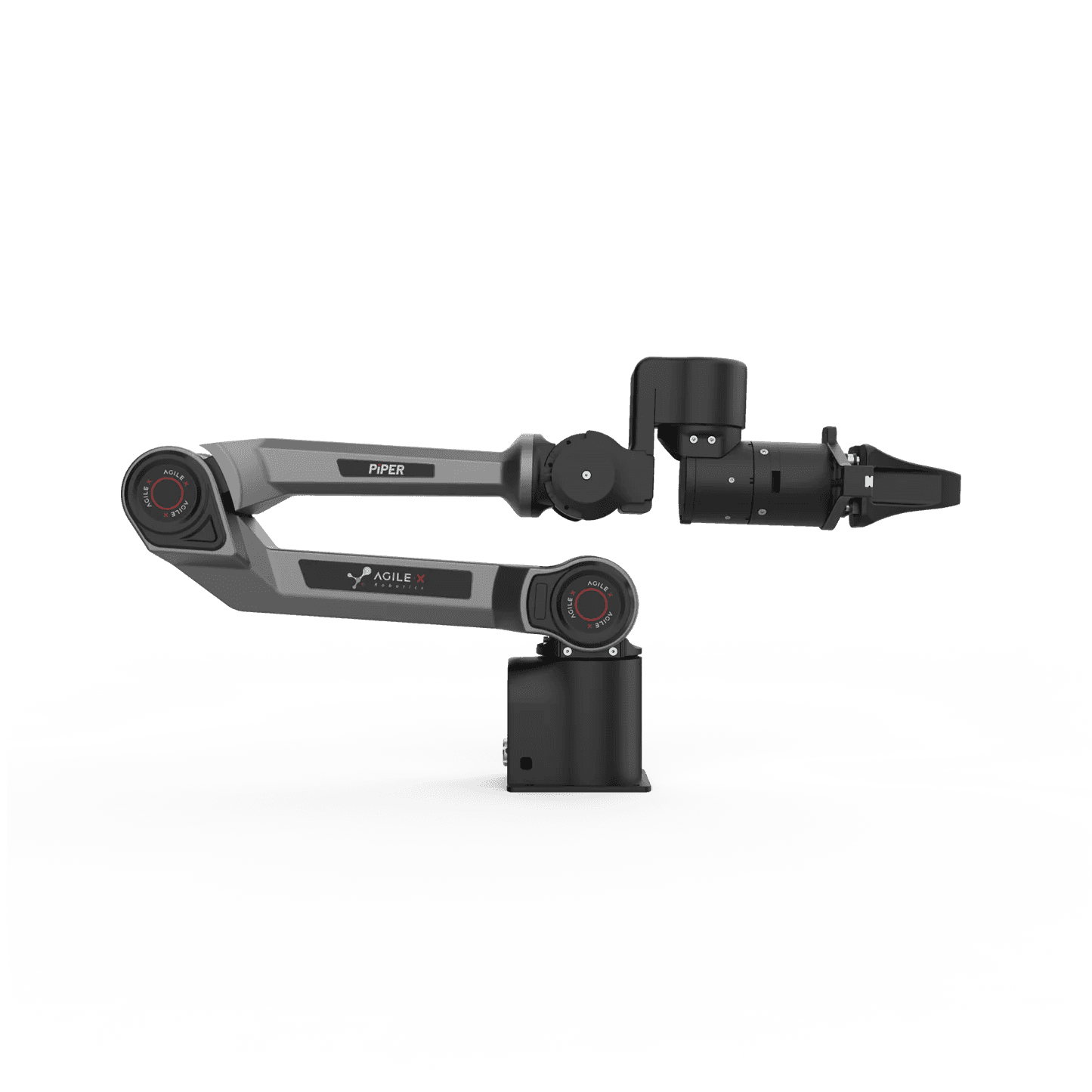

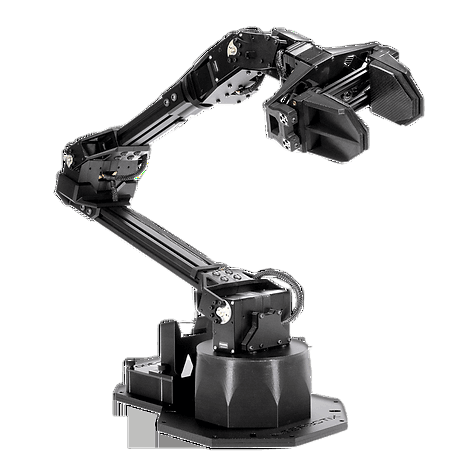

Bimanual manipulation stations
Dual 6-DoF arms with parallel-jaw grippers for bimanual manipulation.




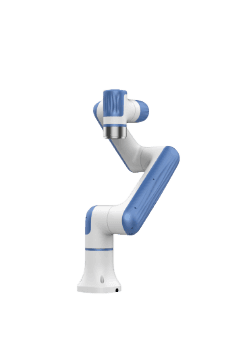
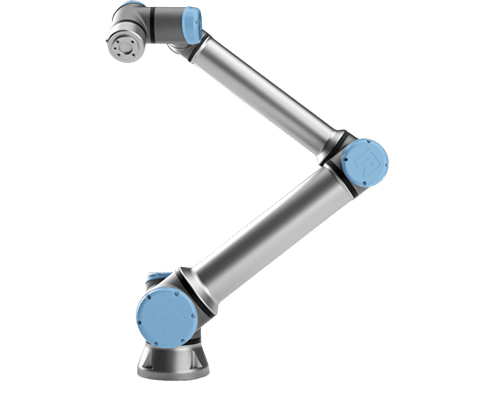
Dexterity stations
Stationary dexterous hands for grasping, regrasping, and manipulation.
How it works
Select a hand, submit a job via REST API or Python SDK, and monitor execution with live footage and telemetry.
from baseline import BaselineClient
client = BaselineClient()
job = client.jobs.submit(
type="wuji_hand",
policy="baseline/smolvla-wuji@main",
task="sort_glassware",
max_duration_minutes=18,
)
print(job.url)Pricing & availability
Billed by the minute.
R&D Booth
Designed for research with real-time monitoring and sensor stream.
| Resolution | 1080p |
| Frame rate | 60 fps |
| Max continuous run | 45 min |
| Daily cap | 180 min |